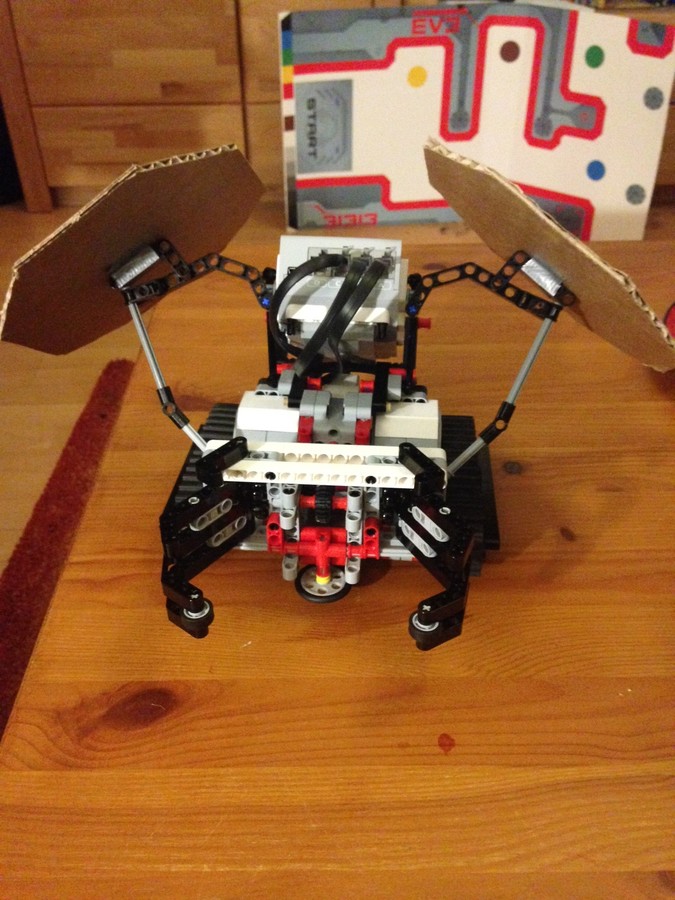
ich konnte einen stablien unterbau mit funktionierenden greifer zusammen bauen platzhalter für die später kommenden solarmodule sind auch schon dran ;)
ich wollte es so machen das , wenn akku bald leer , dreh dich so lange bis die hellste position gefunden wurde und warte bis voll.
licht sensor etc habe ich ja da
und in meiner wohnung kommt das licht eher von der seite als von oben ;)
edit:
da nen video zum ausrichten
https://www.youtube.com/watch?v=QovHiibWYfc
Sieht schon sehr gut aus. Würde aber die Solarpanel horizontal anbringen da der Roboter sich sonst immer ausrichten muß um die Batterien zu laden. Horizontale Ausrichtung ist zwar auch nicht perfekt aber immerhin kann er dann rundherum Licht einfangen.
Ich würde die beiden Paneele nur nicht in zwei verschiedenen Winkeln abstehen lassen. Woher weiß dein Robi sonst, wo mehr Energie erzeugt wird. Oder gibst du jedem Paneel einen Lichtsensor?
Warum machst du die Paneele nicht dreh- und schwenkbar? Dann mit einem Sensor dran und der Robi muss sich nicht bewegen, sondern die Paneele.
P.S.: Ich weiß, dass man Paneel eigentlich nur bei Holzverkleidungen sagt, aber das Wort ist so cool. ^^
ich würde einfach hinten in der mitte den licht sensor anbauen ... wenn der sensor auf die hellste stelle schaut sollten theoretisch beide Paneele gleich viel licht bekommen
aber das ist erstmal nur so .... ausrichten kann ich dir immer noch wie ich will
dreh und schwenkbar machen ... klar könnte ich :D nur gibt es nicht solch kleine motoren ;)
und aktuell hätte ich nur noch einen ausgang an der steuereinheit
Diese Seite verwendet Cookies. Durch die Nutzung unserer Seite erklären Sie sich damit einverstanden, dass wir Cookies setzen.Weitere InformationenSchließen

Kommentare 8
Cpt. Tichy
Troll
Cheesecake
Allan Sche Sar
Troll
Cheesecake
Troll
Cheesecake